モーションコントロールの概要と基礎知識を分かり易く解説します。
目次
モーションコントロールとは
モーションコントロールとは、「動きを制御する」という意味を持っています。その代表として、各種モータによる位置制御などがあげられます。電気的エネルギーをモータに与えることにより、モータは動作し運動的なエネルギーに変換します。その技術は、工作機械、ロボット制御、半導体製造装置、射出成形機やデジタル家電検査装置などの中核として大きな役割を担っており、この分野における設備投資は近年大きく成長しています。
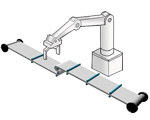 コンベヤの回転制御
コンベヤの回転制御
多軸ロボットの軸制御
 回転テーブル
回転テーブル
位置決め制御
 XYテーブル
XYテーブル
位置決め制御
モーションコントロールボードとは
指定のパルス数や周波数でパルス列を出力する機能を搭載したボードです。目的位置、速度、加減速レートなどの動作パラメータに応じた制御パルスを自動的に出力することができます。位置決め制御に必要な各種リミット入力機能も備えています。モータ本体の制御は、モータドライバが行います。モーションコントロールボードは、このモータドライバユニットに対してパルス信号を出力し、モータを制御します。パルス入力タイプのステッピングモータやサーボモータと接続して使用します。

モータドライバユニットとは
ステッピングモータおよびサーボモータを駆動するための制御ユニットです。このドライバユニットにたいして制御信号の設定/取得を行うことにより、モータ制御を行います。
ステッピングモータとは
高精度な位置決めが可能なモータです。入力パルスに同期して、ステップ状に一定角度づつ回転します。ステッピングモータは、入力パルスに対して正確に回転するため、回転量の検出が必要の無い高精度な位置決めが可能です。1ステップ(1パルス)=1.8°、0.72°、0.36°などの分解能が一般的です。
特長
- オープンループで高精度な位置決めができます。
- 起動・停止の応答性に優れてます。
- 停止時の角度誤差は累積されません(一般的なステッピングモータの誤差は、±0.05°と高精度です)。
- 停止状態でも大きな自己保持力が得られます。
- 低速時に高トルクが得られます。
- モータの構造が簡単なため、メンテナンスが簡単です。
ステップ角
ステッピングモータでモータドライバに1パルスが入力された時にモータが動く角度のことです。1ステップ(1パルス)=1.8°、0.72°、0.36°などが一般的となっています。パルス数で回転量、パルス周波数で回転速度を指定します。
例)ステップ角0.72°の場合にキャリアを50mm移動させるために必要なパルス数は?
-
モータが90°回転するために必要なパルス数:90 ÷ 0.72 = 125
-
パルスモータ1回転(360°)に必要なパルス数:125 × 4 = 500パルス
-
1回転でキャリヤが10mm移動すると仮定すると:50mm ÷ 10mm = 5回転
-
必要な移動パルス数 = 500パルス × 5回転 = 2500パルス
回転速度
ステッピングモータの回転速度はパルス信号の速度に正確に比例します。回転速度とパルス信号の速度の関係は、以下の公式にて求めることができます。パルス数で回転量、パルス周波数で回転速度を指定します。
モータ回転速度(r/min) = ステップ角(°) / 360° × パルス速度(周波数:Hz) × 60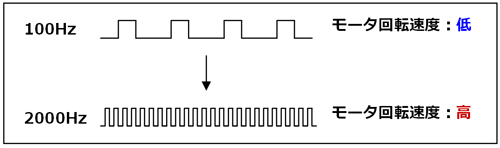
- 例)ステップ角= 0.72°, パルス速度=1000Hzの場合のモータ速度
- モータ回転速度(r/min) = 0.72/360 × 1000 × 60 = 120(r/min)
脱調
ステッピングモータにおいて、急激な速度変化(加減速)や過負荷時にパルスに同期してモータが回転できず、停止や位置ずれが発生することを脱調といいます。近年のステッピングモータは、脱調をしないような機構となっています。
サーボモータとは
サーボモータは、ACサーボモータとDCサーボモータがあります。主に製造工場に多く使用されています(工作機械や産業用ロボットなど)。サーボモータは、回転角度を検出するエンコーダーを備えており、クローズループにて高精度の位置決めを行ないます。当社のモーションコントロールボードは、パルス入力タイプのサーボモータに対応しております。
特長
- 大きな加減速トルクを発生できるので、負荷やパルス速度の急激な変化にも脱調することなく、高速応答が得られます。
- 低速から高速までスムーズで滑らかな回転が得られるばかりでなく、運転中の騒音も静かです。
- 高出力を小型、軽量サイズで実現できます。
エンコーダ入力とは
当社のモーションコントロールボードは、フィードバック制御用のカウンタ機能を搭載しています。インクリメンタル形(加算・減算動作)のエンコーダを接続して、高精度なフィードバック制御を行うことができます。なお、フィードバック制御自体は、プログラミングが必要です。入力回路は、2相(A相/B相)、および単相(UP/DOWN)に対応しています。差動出力、TTLレベル出力、オープンコレクタ出力に対応したエンコーダが使用可能です。
主な用途
- サーボモータからのパルス出力 → 位置情報を管理/制御
- ステッピングモータの脱調検出
パルス出力信号/出力形式
当社のモーションコントロールボードは、パルス列入力方式のモータドライバに対応した以下の出力方式を持ちます。
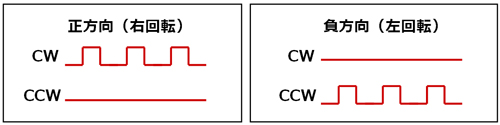
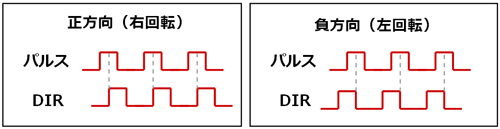
2パルス方式(独立パルス出力)
正方向用(CW)、負方向用(CCW)の独立した2つのパルス信号を出力して制御する方式です。CW(Clock Wise)は時計回り(右回転)、CCW(Counter Clock Wise)は反時計回り(左回転)を示します。
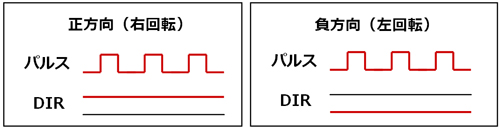
共通パルス方式(方向信号出力:OUT(パルス出力)、DIR(方向出力))
移動量と速度を制御する1つのパルス信号と、回転方向を決定する信号で制御します。
OUT(進みパルス出力)、DIR(遅れパルス出力)方式
OUT(進みパルス出力)信号とDIR(遅れパルス出力)信号が出力されます。DIRがOUTと位相が+90°異なるとき、正方向(時計回り)に動作(回転)します。DIRがOUTと位相が-90°異なるとき、負方向(反時計回り)に動作(回転)します。
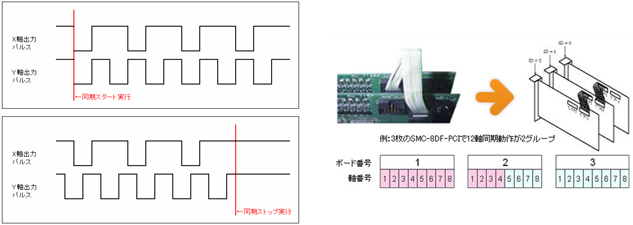
多軸同期・ボード間多軸同期
当社のモーションコントロールボードは、複数軸間の同時開始/停止の同期制御が可能です。また、専用の同期制御ケーブルを接続することにより、最大16枚(128軸)の同期制御が可能です。8軸ボードの場合、4軸ごとにグルーピングが可能です。
リミット入力
モータ(キャリア)の停止・減速ポイント・原点などを検出する機能です。高度な位置決め制御を行うことができます。

- +LIM / -LIM(方向リミット):+は時計方向、-は反時計方向
- 限界位置を検出する入力信号です。+LIMはモータの回転方向がCW(時計回り)のとき、また、-LIMはCCW(反時計回り)のときでそれ以上動かすことのない位置に取り付けます。キャリアがこの位置に達すると、いかなる動作状態であってもモータは即停止します。
また、その後同一方向への動作指示(命令)が与えられてもリミットがかけられている限り、このリミット位置以上動くことはありません。そして、逆方向への動作指示で再び動作(回転)を開始します。
- +SD / -SD(方向スローダウン):+は時計方向、-は反時計方向
- SDは、高速回転中(加減速動作時)に減速を開始する位置を検出するためのリミット入力です。これは、高速で動作(移動)してきたキャリアがこの位置で減速を開始し、開始速度になった後停止します。
- ORG(原点リミット)
- 各動作の基準となる原点を検出するためのスイッチ入力です。ソフトウェアにより論理方向の設定が可能です。設定により、信号入力時に停止します。
アラームコード
ドライバユニットには、アラーム信号の発生と同時に、アラームコードを送出するものがあります。アラームコードはアラームが発生された原因を示します。アラームコードをアプリケーションで受け取ることができるので、各アラームコードに対応する(応急)処置方法を画面に出力することにより、オペレータが早急に、決められた(応急)処置を施すことが可能です。
アラームクリア信号
サーボモータおよびステッピングモータのドライバユニットは、過負荷、過電圧、過熱を保護するために、モータを停止させる場合があります。そのとき、ドライバユニットからボード(アプリケーション)にたいして、アラーム信号を送出します。アラーム信号を受け取ると、同期設定されている軸の動作も停止させます。アプリケーションがアラーム信号を受け取ると、そのシステムを切り離して処置を行い、アラーム信号を解除する必要があります。このとき、アラームクリア信号を送出します。
ホールドオフ
ステッピングモータで位置決めを行う場合、停止状態を保持するためにホールドオフ信号を利用します。(自動的に)ボード内部でモータ動作時にホールドをOFF(保持しない)し、モータ停止時にホールドをON(保持する)します。
偏差カウンタクリア信号
サーボモータでは、ドライバユニット内部に偏差カウンタを持ち、これが入力パルスとフィードバックパルスの偏差を計数する働きを持っています。パルスがドライバに入力されると、カウンタにはパルスが積算され(たまりパルス)、モータが回転するとフィードバック信号により、カウンタのたまりパルスを減算し、たまりパルスが0になるように位置決め制御をおこないます。原点復帰動作を行った場合は、原点検出時にモータを即停止させるため、偏差カウンタにたまりパルスが残っている可能性があります。このとき、ドライバユニットに偏差カウンタクリア信号を設定することにより、完全に原点復帰が完了します。
PTP動作
PTP動作とは、ある地点から別の地点までの移動(Point To Point)動作です。簡単な位置決め制御に利用します。当社のモーションコントロールボードは、動作中に任意のタイミングで停止位置の変更が可能です。右図は、加速・定速動作中に新データを最初の目標位置より遠方に変更した場合です。例えばスタート位置から3000パルス位置を指定して動作中、一旦停止することなく5000パルス位置への変更が可能です。
JOG動作
JOG動作とは、移動距離を指定しない移動動作です。手動でモータの位置決めを行う際に利用します。±LIM信号の入力または、停止命令を出すまで連続してモータを動作させます。動作中に任意のタイミングで速度と加減速時間の変更が可能です。
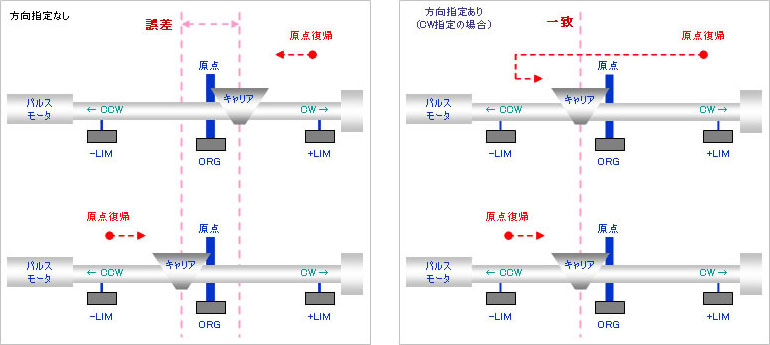
ORG動作
ORG(原点復帰)動作とは、モータを原点に移動させるための動作です。当社では、下記のユニークな原点復帰が可能です。原点復帰動作の設定を行い、動作タイプにORG動作を指定して動作スタートすると、原点復帰が終了するまでドライバが自動的に制御を行います。
従って、原点復帰動作のロジックをお客様が作成する必要が無く、簡単に原点復帰動作を行うことが可能です。
- 原点復帰終了方向を指定することができます。
- 原点リミットセンサは必ずしも高精度なセンサとは限りません。したがって、正方向からリミットを検出した場合と、負方向からリミットを検出した場合とで、位置に誤差を持つ場合があります。この問題を解決するために、常に一方向からのみ原点リミットを検出します。
- NORG(ニア原点)が必要ありません。
- 原点復帰を加減速移動を利用して行う場合、原点リミットで確実に停止させるために、原点リミット付近にニア原点として、減速停止リミットセンサが必要でした。原点リミットセンサ一つで、ニア原点の役割を果たします。
 クリックで拡大します
クリックで拡大します
定速/直線加減速/S字加減速
定速動作
パルスを一定の速度(周波数)で出力します。装置は一定速度で動きます。起動・停止時は急激な速度変化が生じます。
直線加減速動作
起動時、停止時に、一定のレートで速度を加速(減速)させ、起動・停止時のショックを吸収させる動作を言います。台形速度制御とも言います。
S字加減速度動作
直線加減速動作を更にショックを少なく速度制御する方式です。加減速開始時と終了時の加速度を小さくすることにより動作開始時、停止時の振動を軽減します。
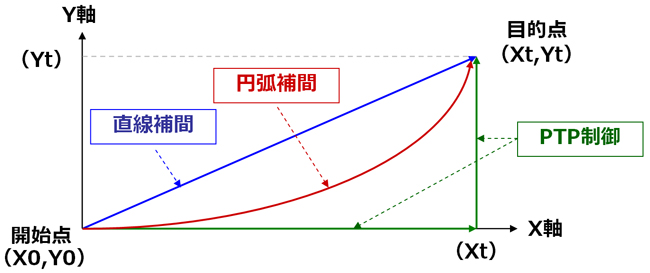
補間制御
2軸以上を制御するときに開始点から目的点までの動かし方は、3つの方式があります。
PTP制御(point to point)
まずX軸を(Xt)点まで移動させ、その後Y軸を(Yt)点へ移動させます。
直線補間
X軸、Y軸を同期制御しながら、合成された軌跡が直線になるように(Xt, Yt)点へ移動させます。
円弧補間
円弧の中心座標と円弧上の目的点を指定し、X軸、Y軸を同期制御しながら、合成された軌跡がプログラムされた軌跡を描くように(Xt, Yt)点へ移動させます。
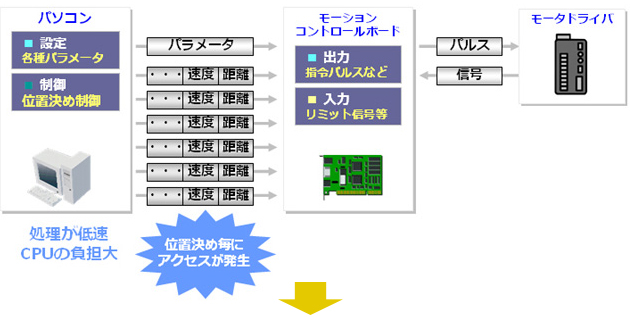
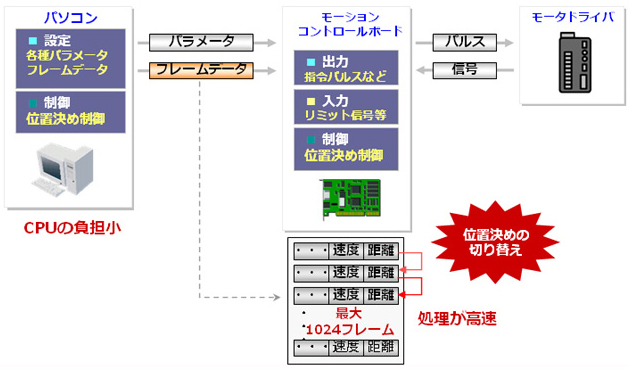
フレーム(バンク)記憶連続動作機能
当社のモーションコントロールボードには、モータ動作に必要な、移動距離、移動速度および加減速レートなどのパラメータ群を一つのフレームとして扱い、連続する複数のフレームをボード内のメモリにダウンロードして、実行することにより、従来のモーションコントロールボードにはない、大きなメリットがあります。
決められたパターンを実行する制御系では、複雑な制御でもパソコンのCPUの負担なしに高速制御が可能です。
各フレームの連続切り替え動作は、ハードウェアで行いますので、次動作切り替え時のアイドリング時間は、1μsec以内です。
したがって、高効率なシステムが構築できます。各種補間制御と組み合わせれば、多軸の連続的な補間制御が可能です。
通常動作
バンク動作
汎用入出力信号(制御信号入出力)
当社のモーションコントロールボードは、汎用入力(制御信号入力)を1軸あたり7点、汎用出力(制御信号出力)を1軸あたり3点を搭載しています。
- ALM(入力)
- モータドライバユニットからのアラーム信号を検知するため信号です。
- INP(入力)
- サーボドライバからの位置決め完了信号を検知するための信号です。偏差カウンタが0になったタイミングで出力されます。INPが割り当てられた場合、INPがONになるまでボードは動作完了と認識しません。
- SD(入力)
- 減速を開始する位置を検知するための信号です。
- LTC(入力)
- 各種カウンタ値をラッチするための信号です。
- PCS(入力)
- 位置決め制御スタート入力、目標位置のオーバーライドを行うための信号です。
- CLR(入力)
- 各種カウンタ値をクリアするための信号です。
- ALMCLR:アラームクリア信号(出力)
- ドライバユニット運転許可、エラー発生時のリセットを行ないます。
- ERC:偏差カウントクリア信号(出力)
- 溜りパルスのクリアを行ないます。
- 各種イベント時(出力)
- 出力パルス値やエンコーダ入力値と設定カウンタ値の一致時(CP1, CP2)などに使用します。
IN1~IN6、OUT1~OUT3の各種入出力信号によりボード側で自動的に制御を行います。
- 例1
- IN1をALM信号と設定した場合、パルス出力中にIN1に信号が入力された場合、ボードが自動でパルスの出力を停止します。IN1をALM信号と設定していなければ、IN1に信号が入力されてもパルス出力は停止しません。
- 例2
- OUT1をERC信号と設定しておくと、パルスの出力が完了し、指定時間経過後、OUT1から1ショットパルス、もしくはレベル信号が自動的に出力されます。