オリエンタルモーター社 電動スライダ EZ limo [イージーリモ] シリーズと当社モーションコントロール使用事例
モーションコントロールは、工作機械、ロボット制御、半導体製造装置、射出成形機やデジタル家電検査装置などの中核技術として大きな役割を担っており、この分野における設備投資は近年大きく成長しています。
コンテックのモーションコントロールプロダクトと、オリエンタルモーター社の電動スライダEZ Limo[イージーリモ] シリーズの組み合わせにより、ワーク搬送や各種位置決め、CCDカメラ自動検査などで、お客様に最適なソリューションを提供します。
今回、使用事例として紹介する電動スライダ EZlimo [イージーリモ] シリーズは、電動スライダとモーター、コントローラが一体となった製品です。電動スライダ部は、設置への設置や配線など使いやすさをと高精度を追求。モーター部は、高信頼・高速・高可搬質量を備えたステッピングモーターを採用、電動スライダの位置決めに必要な機能を簡単な操作で実現するコントローラがセットになっています。

![モーター 一体型 電動スライダ EZ limo [イージーリモ] シリーズ オリエンタルモーター社では、モーターと機構部品を一体化したさまざまな電動アクチュエータを製品化。自動機器の電動化設計や、製作の省力化に最適な製品を豊富にラインアップしております。 オリエンタルモータ EZ limo [イージーリモ] シリーズの詳細はこちら [オリエンタルモーター社のホームページへ]](/-/media/Contec/jp/support/basic-knowledge/daq-control/motion-control/motion-control/images/img_motion-control_01.jpg) ※社名および製品ロゴ、画像はオリエンタルモーター株式会社の許諾のもと使用しております。
※社名および製品ロゴ、画像はオリエンタルモーター株式会社の許諾のもと使用しております。
4軸高機能モーションコントロールボード [SMC-4DF-PCI] とEZ limo EZSシリーズとの接続例
4軸高機能モーションコントロールボード [SMC-4DF-PCI] とEZ limo EZSIIシリーズ使用例です。
接続には、配線がスムーズに行える専用端子台を使用しています。今回の構成は、ノートパソコンにPCI拡張アダプタとPCI拡張シャーシをコントローラとして、2軸制御(X-Y)を行う事例です。キャリアには、レーザーポインタを接続しています。
当社モーションコントロール機器構成
オリエンタルモーター社機器構成
-
EZS4D020-K
電動スライダユニット(X軸) (含むコントローラ)
数量:1
-
EZS3D020-K
電動スライダユニット(Y軸) (含むコントローラ)
数量:1
-
PAES-S
EZSシリーズ専用 センサセット
数量:2
-
PAB-S4S3R020
2軸 取付ブラケット
数量:1
-
CC010ES-2
X軸用標準ケーブル スライダとモーションコントローラ接続
数量:1
-
CC010ESR-2
Y軸用可動ケーブル スライダとモーションコントローラ接続
-
CC36D2-10
X・Y軸用 I/Oケーブル(2m)
数量:2
ノートPCと拡張シャーシ(SMC-4DF-PCI挿入)と専用端子台との接続
ノートPCのCardBusスロットに拡張アダプタを挿入し、PCIバス拡張シャーシに接続します。
PCIバス拡張シャーシの拡張スロットにモーションコントロールボードを挿入します。
モーションコントロールボードのコネクタと専用端子台のCN1を接続用ケーブルで接続します。

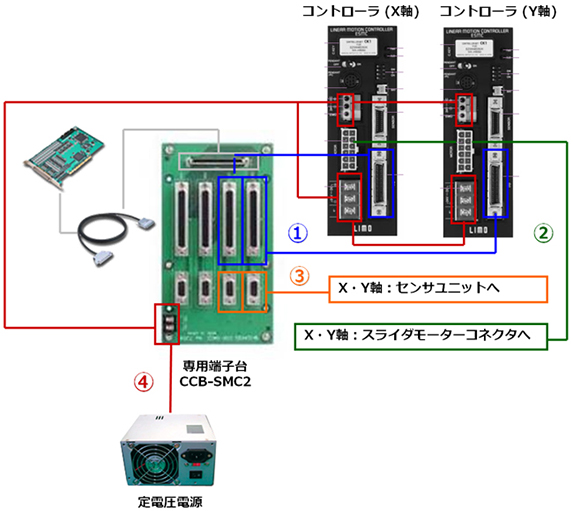
専用端子台とモーターコントローラおよび電動スライダ、周辺機器との接続例
専用端子台とモーターコントローラおよび電動スライダ、周辺機器との接続例
端子台のCN2とCN3にI/Oケーブルを使用して、各軸モーターコントローラのI/Oコネクタ部を接続します。端子台に接続する、コネクタおよびコネクタカバーは電動スライダに付属されています。
軸用接続ケーブルを使用して、各軸のモーター部と接続します。
端子台のCN6とCN7にX軸・Y軸のセンサユニット [±LIM(限界位置)、ORG(原点)] を接続します。
端子台のCN10と電源ユニットを接続します。CN10からモーターコントローラの各電源部へ接続します。スライダおよびセンサユニットへの電源供給は、各コネクタの電源ピンから供給します。
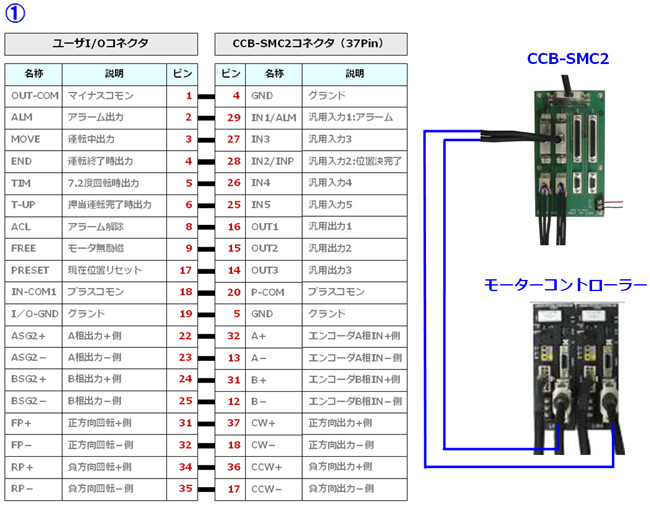
モータドライバとのコネクタ配線図
モーターコントローラのユーザI/Oコネクタと専用端子台[CCB-SMC2]のCN2 CN3接続例です。
なお、本接続例ではモーターコントローラは[コントローラモード]の設定となります。
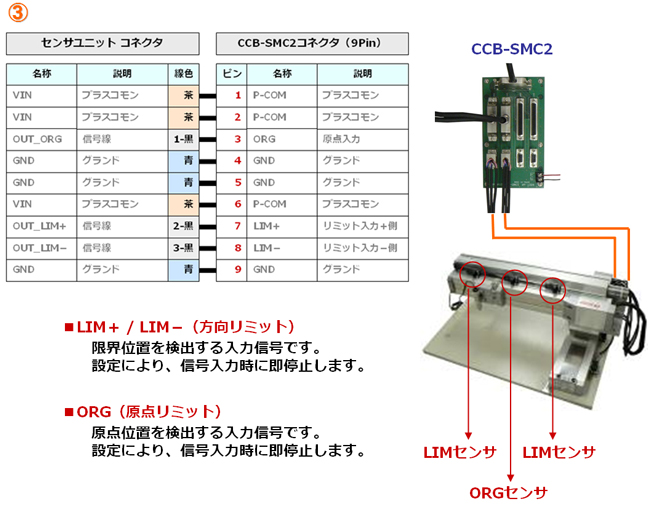
センサユニットとのコネクタ配線図
X・Y軸電動スライダ本体に取り付けられたセンサユニット(±LIM、ORG)とCN6 CN7の接続例です。
電動スライダ EZ limo [イージーリモ] EZSIIシリーズ プログラム例
今回、構築したシステムで動作するサンプルプログラムです。初期設定を組み込んであるので、下記対象モーターで直ぐにJOG、PTP、ORGの各動作が可能です。プログラムの要点が分りやすいコメント付きです。
- 対象モーター
- オリエンタルモーター社製電動スライダ EZ-limo EZSIIシリーズ
- 使用言語
- Visual Basic 2005
- パルス出力モード
- 2パルス方式[正論理]
- ORG動作、汎用入出力設定
- 原点復帰終了方向:CW方向、Z相:使用しない
汎用入出力設定
IN1:アラーム(正論理)
IN2~IN6:汎用(負論理)
OUT1~OUT3:汎用(負論理)